Researchers at the University of Lübeck, Institute of Computer Engineering, Germany have developed MONSUN AUV (an autonomous underwater vehicle).
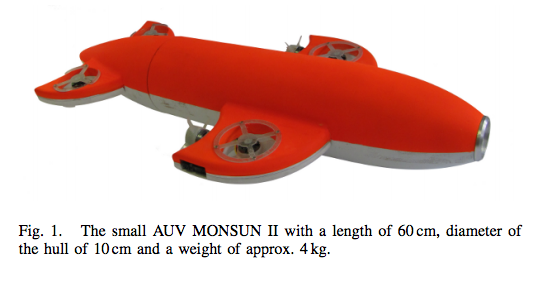
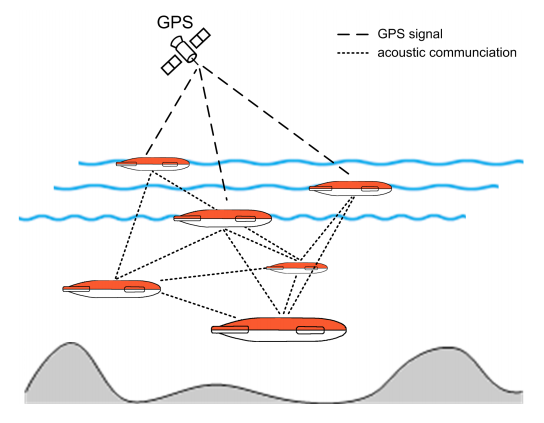
Environmental monitoring and inspection of water-bodies is rapidly becoming indispensable due to changing environmental conditions as well as the growing need to discover ways to conserve it. A swarm approach to monitoring increase efficiency by the inherent redundancy and fault-tolerance of a swarm. For the swarm to be effective, the system must be scaleable and must have a global knowledge and communication system. Swarm redundancy also eliminates the need for high cost, long range sensors. For this, the researchers at the University of Lübeck have developed the MONSUN II AUV.
The team have released a few papers that detail the robot swarm setup, the hardware and software development of the MONSUN II and the details of the preliminary testing of the robot’s performance.
You can also see the MONSUN in action in this video released by the researchers.
 RSS
RSS