
Road Narrows is a robotics and intelligent systems company that sells and provides technical support for some of the most popular robotic product lines used by the academic and research community worldwide. We also provide contract engineering services, from ideation through production-ready models while our Research and Development team develops open-interface hardware and software robotic solutions, including systems for existing and original robot hardware solutions.
The Challenge
Our goal was to make a highly-capable robotic arm for research institutions and light industry using off-the-shelf components in order to minimize the price while still achieving performance similar to arms priced 200-500% higher. However, we wanted to keep our design as open as possible, using end effector hardware and software interfaces that are freely available so customers can make their own custom grippers or other peripherals to solve a multitude of tasks.
To this extent, we needed a Linux-based computing solution in a very small form factor with enough power to handle processor-intensive tasks such as image processing in addition to running the Hekateros control software. We also needed a Linux distribution with broad support and full features in order to avoid spending unnecessary time on technical support issues.
The Gumstix Overo FireSTORM Computer-On-Module (COM) provided us a powerful computing platform to run the Hekateros core software and users’ custom programs. The addition of a Gumstix Tobi expansion board gave us an abundance of connections to easily connect a large number of peripheral devices, including a 720p camera located on the end effector.
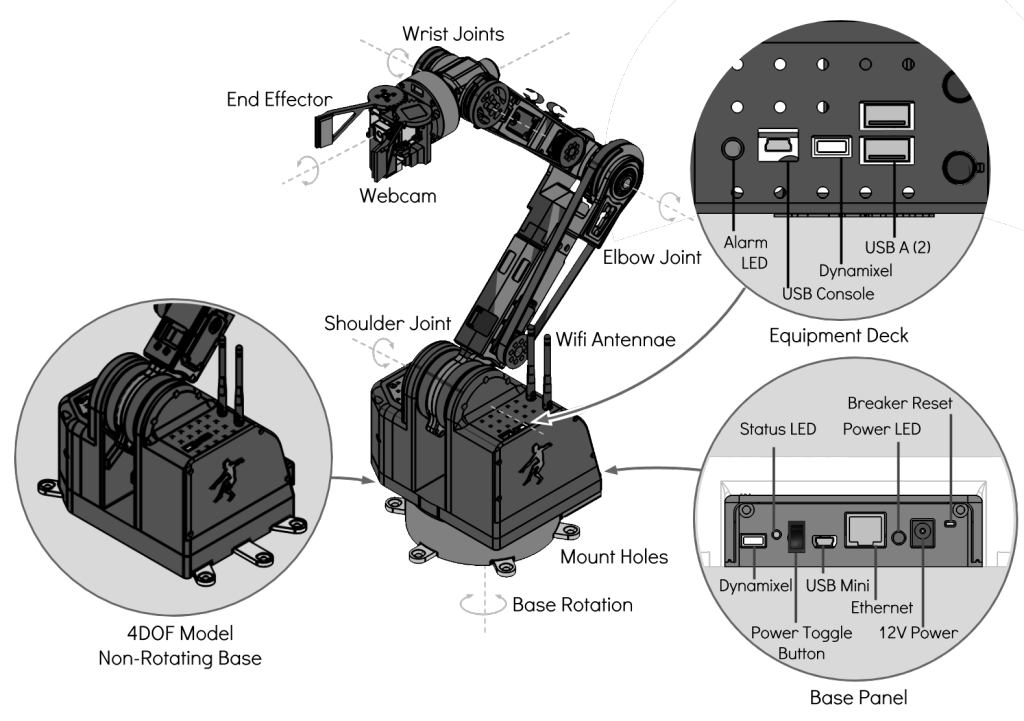
The Hekateros Arm
Hekateros is a great ready-to-use platform for researchers more interested in diving into original research than reinventing the wheel, by designing a custom arm from the ground up. With 5 degrees-of-freedom and a 360º rotating base, the Hekateros leverages a scaled approach to provide maximum flexibility to users. Our robotic arm features intuitive control through the use of a video-game-style controller mechanism (an Xbox controller) in manual mode and tight integration of Robot Operating System (ROS) functionality, allowing for program-based control, including programmed, repeatable actions through the Movelt! Motion Planning Suite.

Users can run Hekateros software and their own custom software in a variety of configurations: on a local Linux running PC, directly on the Gumstix COM embedded in the Hekateros running Linaro Linux, or even over the internet, as each arm comes network-ready with Wifi and Ethernet. Thanks to ROS integrations, a vast array of tools are immediately available to the user to accomplish basic tasks with little or no extra work. Users can also integrate custom software to carry out certain tasks through ROS or directly through other Hekateros interfaces.
The Hekateros manipulator provides users and their programs continuous feedback of each joint’s position, torque, and other useful metrics to elucidate robotics concepts in educational contexts, provide data relevant to research, and aid decision-making in practical applications. The network scalability allows multiple Hekateros arms to be controlled by a central computing system, allowing them to work together in an intelligent manner.
At its competitive $10,000 price point, Hekateros is affordable to academic customers for educational use as well as for research purposes, especially when using multiple robotic manipulators for the development of algorithms and approaches to control for multi-coordinated robotic arms.