Joining the AeroCore 2 family is the new AeroCore 250 MAV board for Overo COMs.
Like its cousin, the AeroCore 2 for Overo, the AeroCore 250 was designed as a drone autopilot to be coupled with a Pre-GO PPP series GPS board. It has many of the functions found on its cousin, such as WiFi/Bluetooth, a 3-axis gyroscope, USB console port, and a Cortex M4 microcontroller that runs NuttX real-time OS. However, the AeroCore 250 has four PWMs, ideally suited for quadcopters of size 250mm x 250mm, motor to motor.

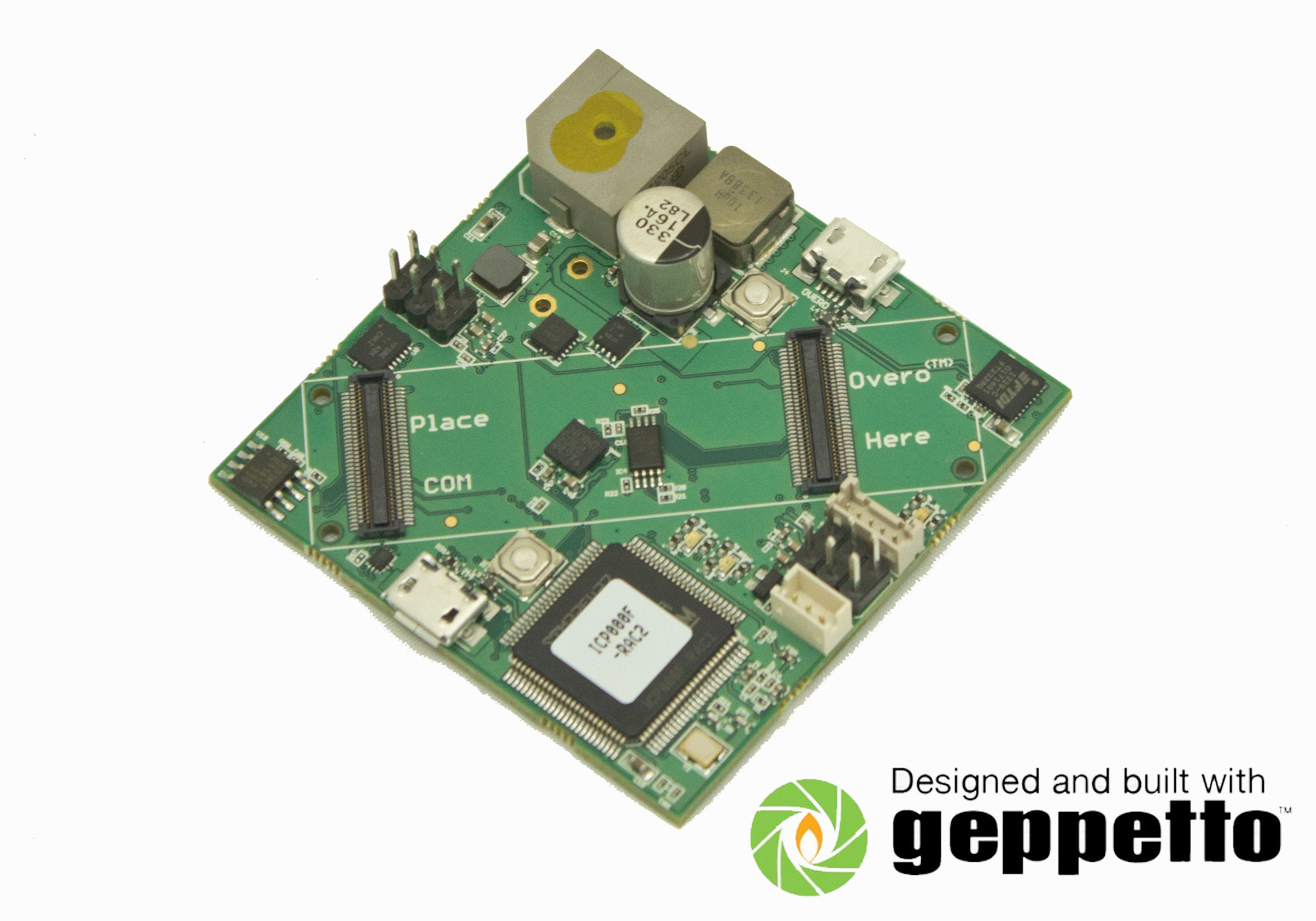
The AeroCore250 board was designed in Geppetto but modified further by Gumstix Engineering to its current shape and layout, with the Overo COM connectors placed diagonally on the board.
The AeroCore 250 currently supports ArduPilot platform’s commonly used ground stations: Mission Planner (written in C#) and APM Planner 2.0 (written in C++). Additionally, it is fully compatible with the PX4 open-hardware project’s suite of software including MAVLink (communication protocol) and QGroundControl (written in C++ using Qt libraries).
Gumstix also has autonomous and robotics kits that include most everything you would need to control your autonomous applications.
 RSS
RSS